Every January, MIT hosts several competitions. One of these competitions is 6.270, the Autonomous Robot Competition. Each year, student organizers create a challenge that pits robots against each other in 2-3 minute showdown.
The Game
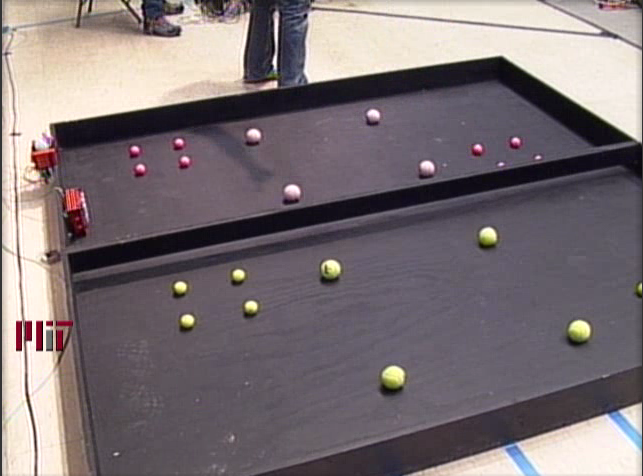
The 8′ x 8′ arena was divided into two sides for each robot to move around in. The goal for each robot was to have fewer balls on its side at the end of the 2 minute match. Golf balls could be rolled under the “rift” in the middle of the field and were worth 1 point. The tennis balls were worth 3 points but couldn’t fit under the “rift”, and instead needed to be dropped over it.
Requirements
- Each team can have at most three team members
- The robot must fit within the 1′ x 1′ x 1′ box that the kit came in
- The robot must pass a 3-foot drop test
The Team
Luke O’Malley ’14 Tim Wilzcynski ’14 Adrian Grossman ’14



Our Strategy
- Collect as many balls as possible
- With 15 seconds left in the match, dump all of the balls onto the opponent’s side.
This strategy took advantage how each match was scored. Because the ball totals were collected at the end of the match, it was advantageous to make sure the opponent did not have time to send the balls back over.
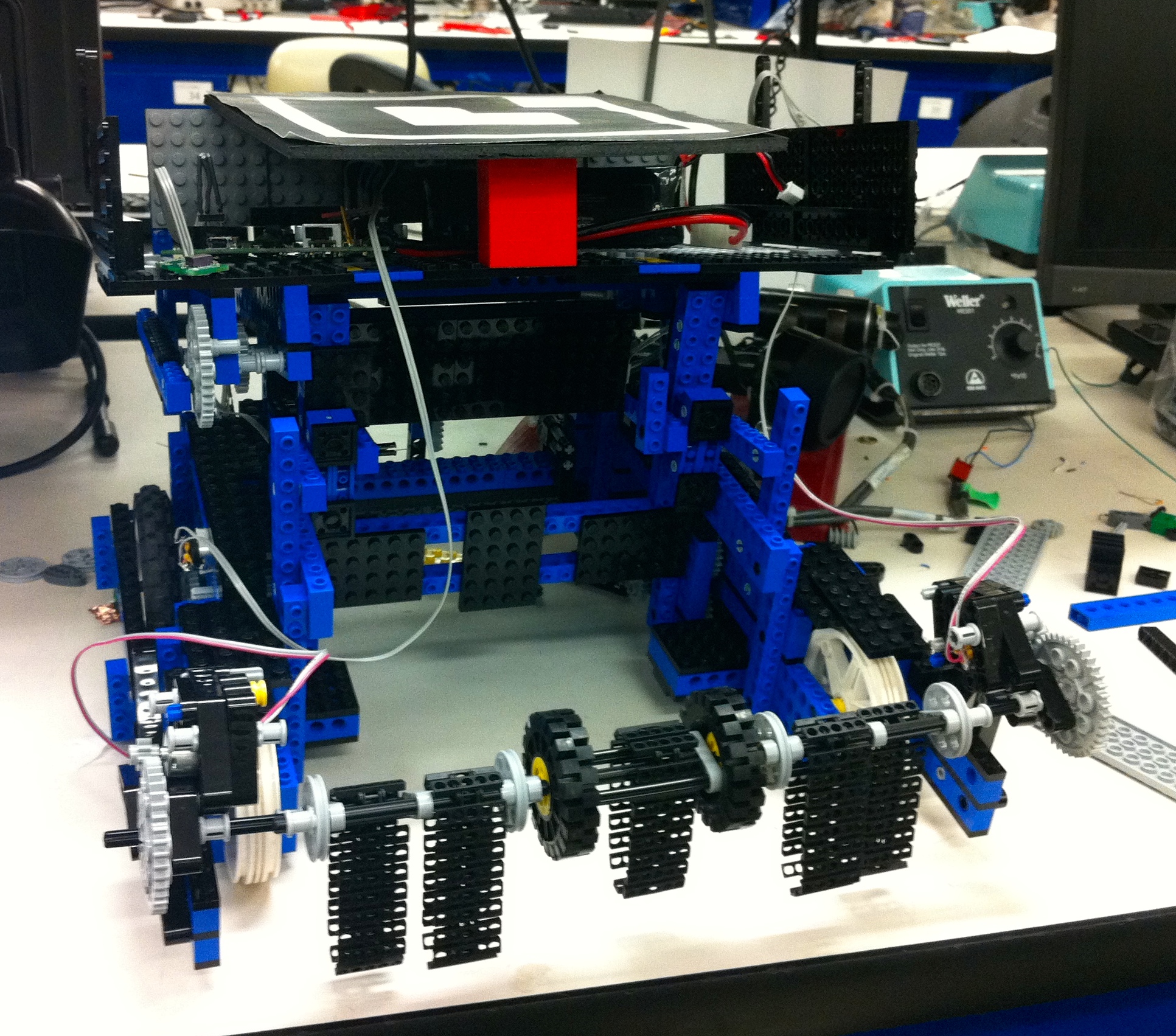
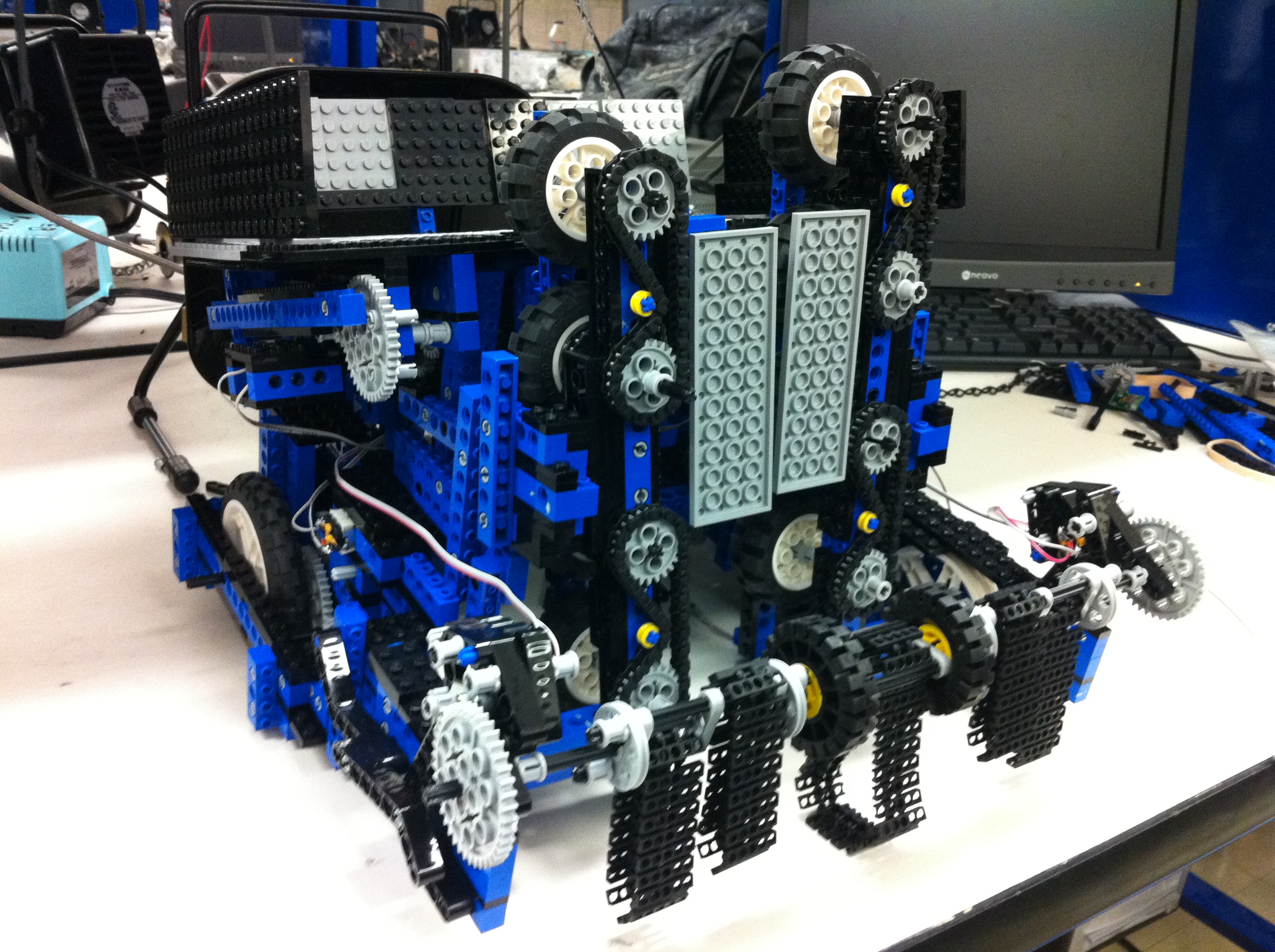
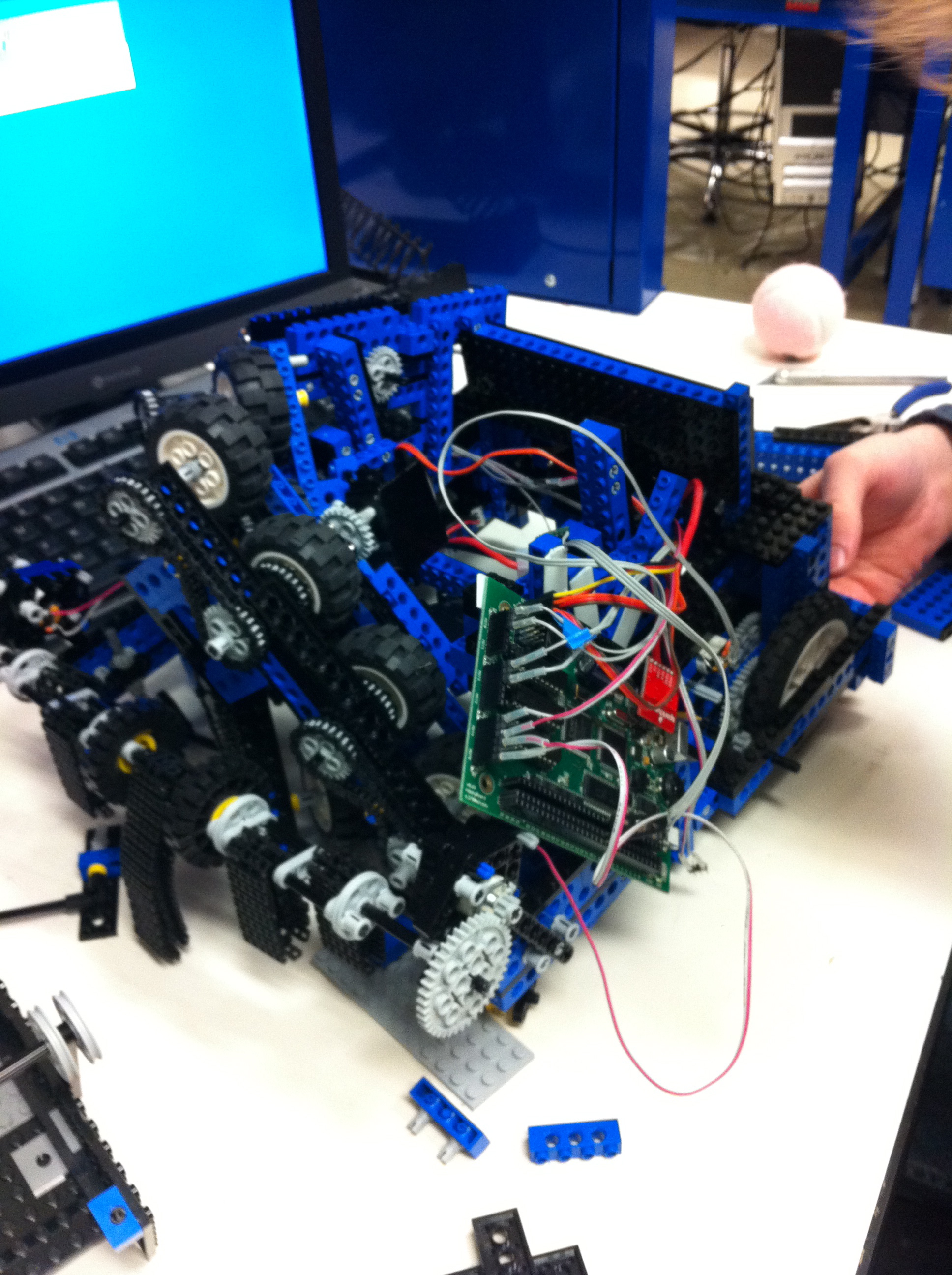
Mechanical Design
Our strategy very clearly defined our mechanical design goals:
- Two maximized ball collection zones
- A lower area for storing golf balls
- An upper area for storing tennis balls
- A way to keep the stored golf balls inside the lower storage area
- A mechanism to lift tennis balls into the upper storage area
- Methods or dumping the stored tennis balls and releasing the golf balls
Navigation discussion SOON TO COME!
